Introduction to Cognitive Robotics
3. A glimpse at modeling robot agents
We begin our discourse about robot agency with introducing a framework of concepts that enables us to formalize the interaction of robots and the environment they act in, how goals and objectives of the robots can be stated and the goal achievement through robot actions be measured, and how robots should select their course of action in order to maximize the impact of its actions.
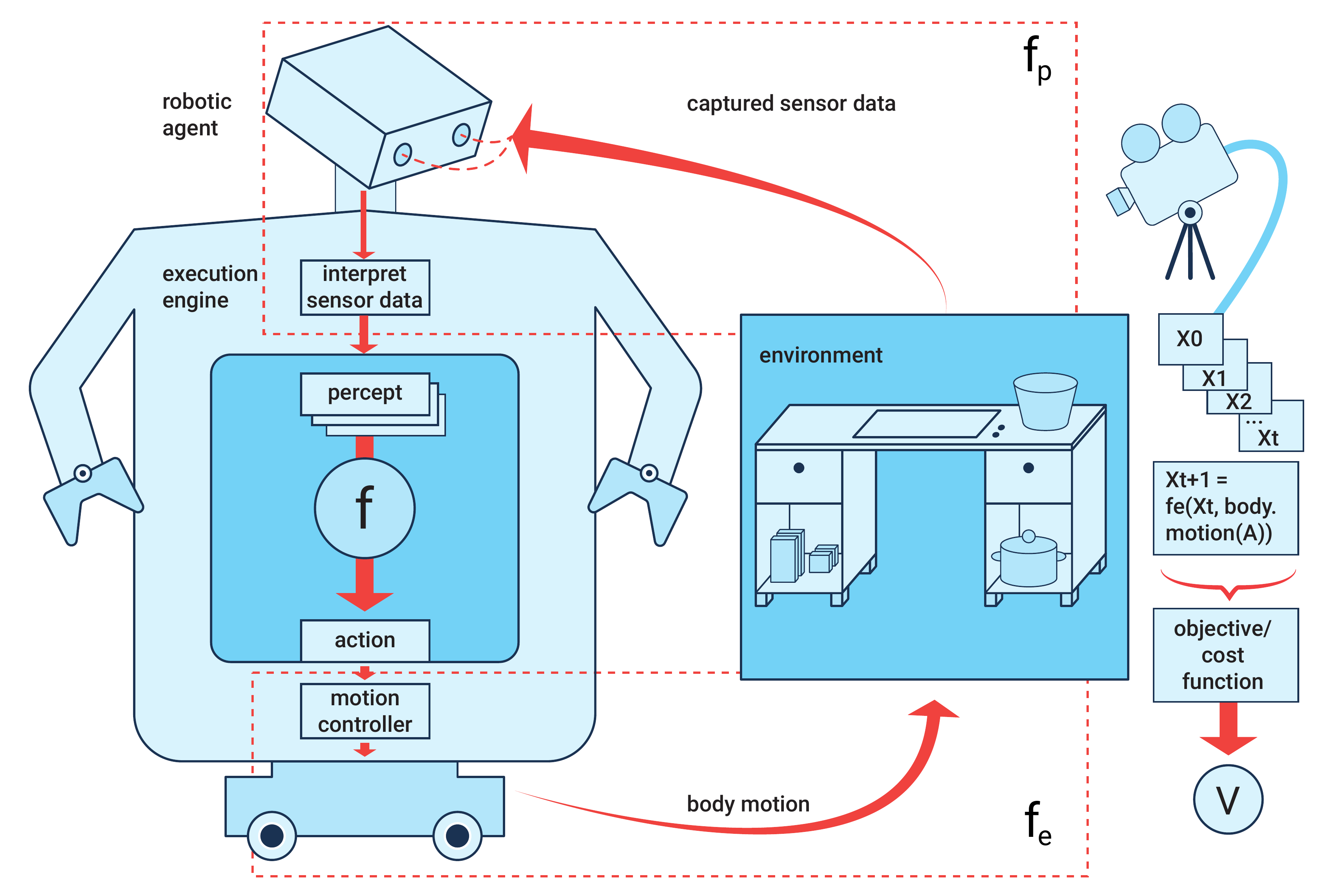
Fig. 1: Top-level model of robot agents.
In our considerations we structure the robot agent and the environment it is accomplishing its tasks in into the controlling system and the controlled system. The controlling system is the control program that receives the data from the robot sensors and outputs motion specifications for the articulated robot body. The controlled system are the motors of the joints of the robot, the robot body, the environment in which the robot is acting and the sensor system that is generating the sensor data that the controlling system is working with.